Cercetători de la École Polytechnique Fédérale de Lausanne au dezvoltat un sistem de control care permite roboților să își transfere abilitățile între modele diferite, fără a necesita reconfigurare completă.
Soluția, denumită „Kinematic Intelligence”, își propune să simplifice utilizarea roboților în medii variate.
O problemă veche în robotică
În mod tradițional, roboții învață sarcini prin demonstrație, fie prin control direct, fie prin ghidare fizică. Aceste abilități rămân însă limitate la modelul pe care au fost învățate.
Diferențele de construcție dintre roboți, precum lungimea brațelor sau poziția articulațiilor, fac ca aceleași mișcări să nu mai poată fi replicate fără reluarea procesului de instruire.
Evitarea zonelor periculoase
Unul dintre principalele obstacole este reprezentat de așa-numitele „singularități”, poziții în care robotul își pierde temporar capacitatea de mișcare controlată. În astfel de situații, pot apărea mișcări bruște sau instabile.
Noul sistem integrează aceste limitări direct în modul de control. Roboții pot astfel să identifice din timp zonele riscante și să ajusteze traiectoria pentru a le evita.
Adaptare automată între modele diferite
Cercetătorii au analizat structura mecanică a roboților și au clasificat tipurile de mișcare în funcție de caracteristicile lor. Pe baza acestei clasificări, fiecare robot „înțelege” propriile limite și poate adapta o sarcină învățată de un alt model.
Testele au arătat că mai mulți roboți diferiți pot executa aceeași secvență de acțiuni după o singură demonstrație, fără recalibrare.
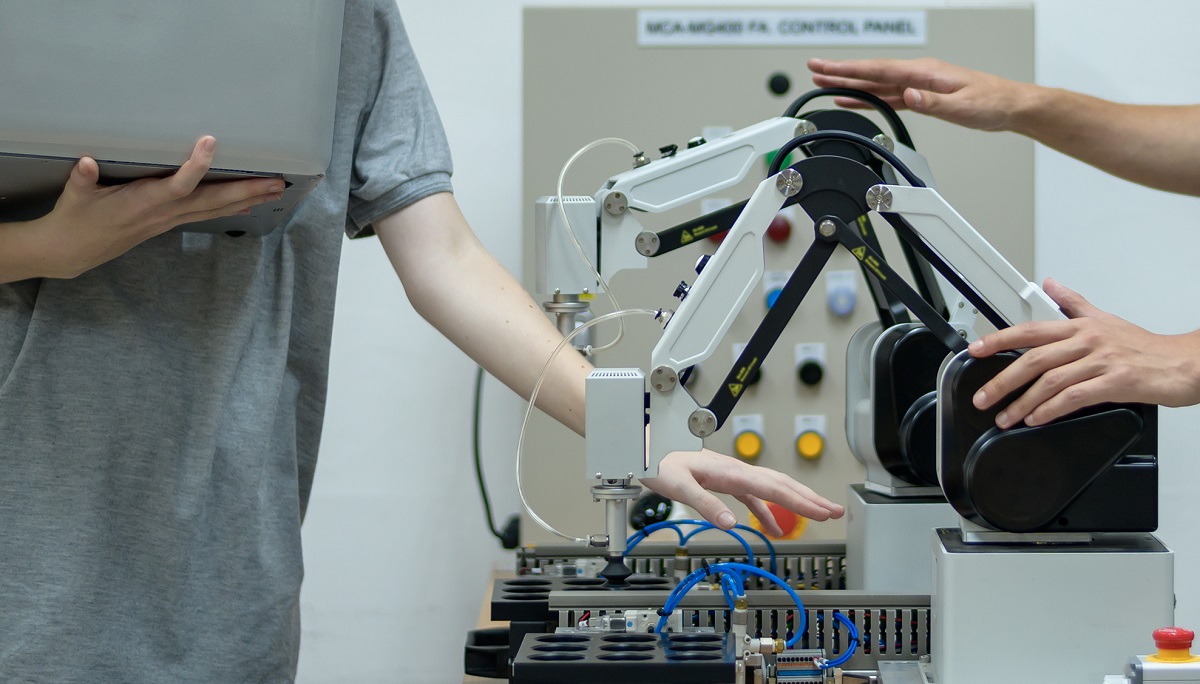
Teste în colaborare
Sistemul a fost verificat într-un scenariu experimental în care mai multe brațe robotice au colaborat pentru a îndeplini sarcini succesive. După instruirea inițială, rolurile roboților au fost schimbate, iar aceștia au reușit să ducă la bun sfârșit operațiunile fără ajustări suplimentare.
Rezultatele indică posibilitatea utilizării roboților într-un mod mai flexibil, inclusiv în linii de producție unde configurațiile se schimbă frecvent.
Limitări și perspective
Deși sistemul asigură siguranța mișcărilor, acesta nu integrează încă funcții avansate de percepție sau analiză a mediului. Roboții nu pot face diferența între obiecte sau situații care necesită tratamente diferite.
Implementarea în medii complexe, precum fabrici sau domeniul medical, necesită dezvoltări suplimentare, în special în ceea ce privește senzorii și capacitatea de decizie.
Un pas spre roboți mai flexibili
Kinematic Intelligence reprezintă o etapă importantă în evoluția roboticii. Prin reducerea dependenței de configurări specifice, tehnologia deschide posibilitatea unor sisteme mai adaptabile și mai ușor de utilizat în diverse domenii.